Playful computation: Interactive performance and capture of minimal surfaces
Carla Flores Travez (2025)
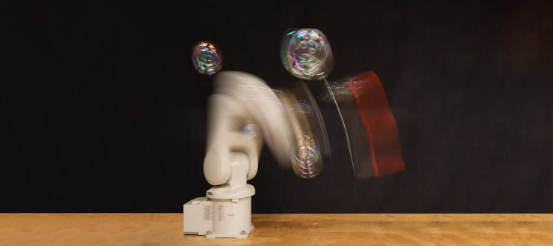
This research by Carla Flores Travez explores robotics as a medium for play, curiosity, and material exploration. Through a series of iterative experiments using robotic arms to generate and capture soap bubbles and other minimal surfaces, the work investigates how computation and robotics can engage with ephemeral materials in embodied, exploratory ways.
The project employs Research through Design (RtD) as its primary methodology, emphasizing testing, making and reflecting as modes of inquiry. Each prototype builds on the last, experimenting with the formation, perception, and digital capture of these fragile surfaces. Findings so far indicate that while robotic systems can reliably reproduce bubble formations under controlled parameters, each iteration carries unique variations that reveal the inherent liveliness of human-material-robot interactions.
These results highlight the potential of robotics as a collaborator in the discovery process and liberating the approach usually tied to precision, efficiency and control. Incorporating computer vision techniques enables the perception and tracking of bubble formations, supporting the development of a responsive interaction loop.
Ultimately, this project contributes to discourses in computational design, HRI, and digital fabrication by proposing a more intuitive, and designerly relationship with technology. Where play, wonder, and experience become valid modes of knowing and making.
This project was supported by the STUDIO staff with committee advisement, Joshua Bard, Golan Levin