Self-Learning Agents for Spatial Synthesis
Pedro Veloso and Ramesh Krishnamurti (2020)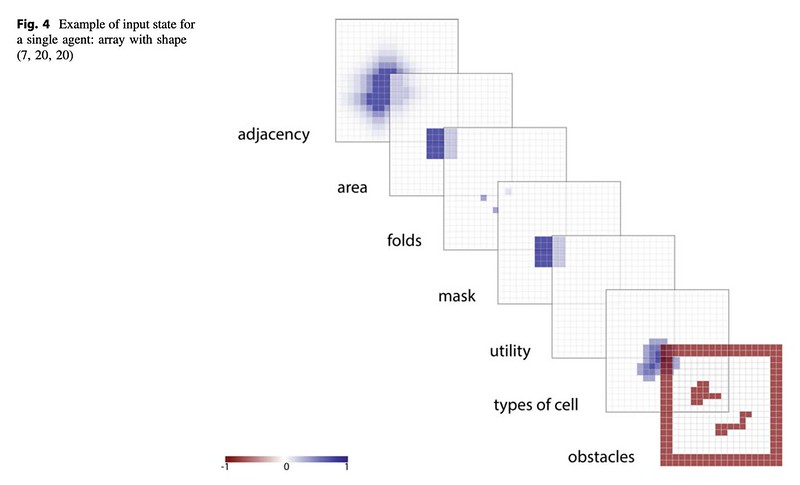
With support in part from Microgrant #2020-035 from the Frank-Ratchye Fund for Art @ the Frontier, Computational Design doctoral student Pedro Veloso and Architecture professor Ramesh Krishnamurti developed an agent-based method for designing floorplans. Their work appears in:
- Pedro Veloso, Ramesh Krishnamurti. “Self-learning Agents for Spatial Synthesis”. In S. Eloy et al. (eds.), Formal Methods in Architecture, Advances in Science, Technology & Innovation: Proceedings of the 5th International Symposium on Formal Methods in Architecture (5FMA), Lisbon 2020. Pages 265-276. https://doi.org/10.1007/978-3-030-57509-0_24. [PDF]
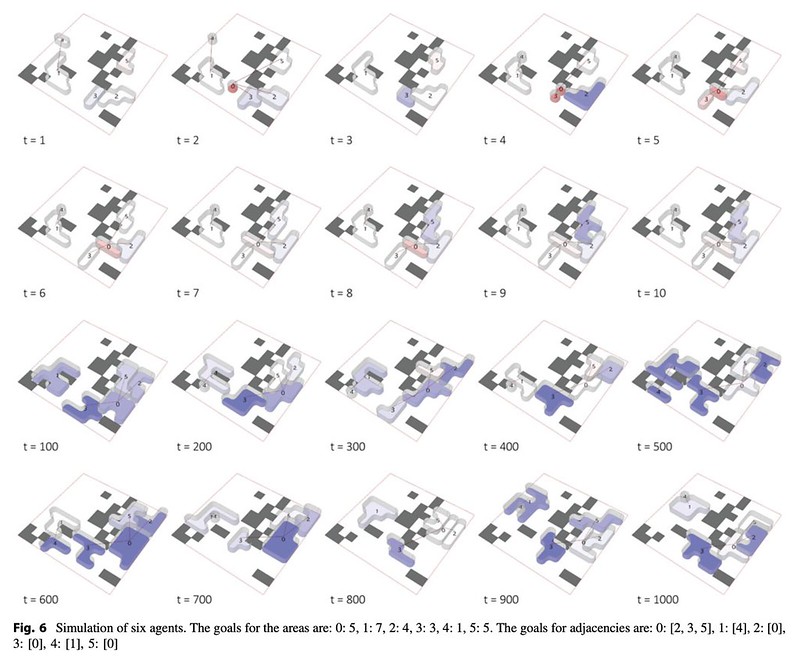
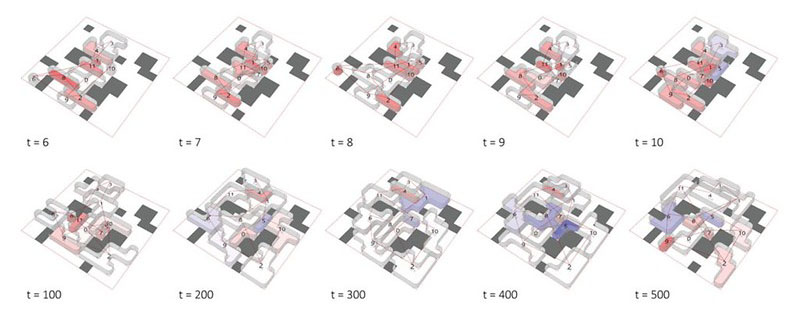
Over the last decades, a vast repertoire of computational methods has been employed for the synthesis of spatial configurations. Many of these techniques, such as the long-standing black-box optimization or generative adversarial networks, enable a quick exploration of the design solutions based on destructive operations, but encapsulate the generative process, promoting disruptive turn-taking between computer and designer. In contrast, techniques based on agents naturally provide partial design information and enable fine-grained interaction. However, existing agent-based models originate from non-architectural problems, so it is not straightforward to adapt them for spatial design. To address this gap, we present a method to create custom spatial agents that can satisfy architectural requirements. While the method can be adapted to a diversity of representations and goals, we focus on a proof of concept where agents control spatial partitions (represented as polyominoes with no holes) and interact in an environment represented as a grid. The agents learn how to satisfy its individual (shape, area, etc.) and collective goals (adjacency) using multi- agent deep reinforcement learning. In this paper, we focus on the formulation of the environment, agents, and goals and present simulations of trained agents to illustrate possible variations.